Se propone utilizar el programa de cálculo del motor asincrónico, obteniendo las características de par y corriente en función de la velocidad, y analizar el efecto que la profundidad de ranura tiene en los parámetros del rotor, a fin de integrar con esta documentación un informe.
Con el lote de datos del archivo "procap5.dat" que corresponde a un motor asincrónico de jaula profunda de 15 kW, se prepara el cálculo.
Se ejecuta el programa de la forma habitual, indicando el nombre del archivo de datos correspondiente, luego indicar el nombre del archivo de salida (por ejemplo el mismo nombre con extensión imp) y por último el nombre del archivo para las tablas (por ejemplo con extensión txt), este ultimo archivo es el que debe levantarse con el Excel.
Desde el Excel se llama el archivo, cliquear "Archivo/Abrir" (para encontrarlo seleccionar tipo de archivo *.txt), en el cuadro de diálogo "Abrir", el asistente para importar pregunta tipo de datos, indicar delimitados, en el paso siguiente indicar separador punto y coma, y se importan los datos.
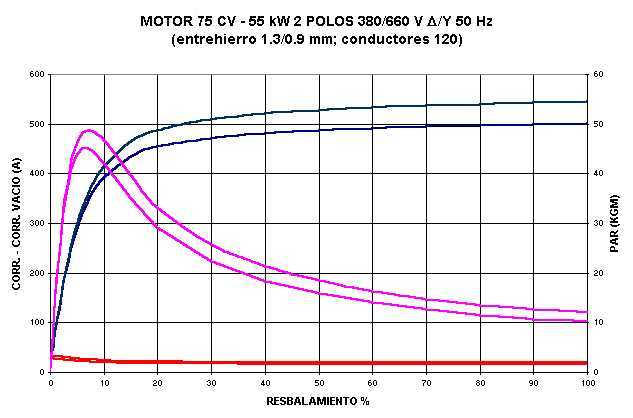
Con los datos en la planilla se definen los valores que se grafican y se observan las características de par y corriente en función de la velocidad figura a1.
{kind=link}
Para el motor asincrónico se debe prestar atención que los valores de par en función del resbalamiento figura a1 están dados en unidad de corriente (A) por lo tanto se los debe multiplicar por la escala de par en kgm/A que se obtiene con la expresión:
![]()
Es importante destacar que el cálculo de motores en la bibliografía clásica supone que las reactancias, (permeancias) son constantes. Con esta hipótesis se desarrolló el programa de cálculo de motores asincrónicos ("MOTOCA"), que no tiene en cuenta los efectos de saturación de los circuitos de dispersión durante el transitorio de arranque.
Cuando se realiza el ensayo de rotor bloqueado (cortocircuito) se tiene en consecuencia un valor de corriente de cortocircuito (de arranque) superior al obtenido por los cálculos, afectando las características de arranque para valores altos del resbalamiento. Este efecto debe ser tenido en cuenta para evaluar las condiciones de funcionamiento reales de un motor.
En particular para un motor asincrónico de jaula profunda, se pueden graficar aquellos parámetros de diseño que tienen incidencia, durante el proceso de arranque, en los parámetros del rotor.
La figura a2 muestra el efecto que la profundidad de ranura tiene en el cálculo de la permeancia de ranura, la figura a3 el efecto que tiene en la resistencia de las barras, vale aclarar que como el número de barras por ranura es igual a 1 la profundidad de ranura resulta igual a PSI.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}